

 Open Access
Open Access Abstract
This study explores the hydrodynamic characteristics of a distinctive unmanned underwater vehicle, the Twin-Pod Autonomous Underwater Vehicle (TPAUV). The TPAUV is composed of two torpedo-shaped buoyant bodies connected by a fixed wing and equipped with a propulsion system that includes two buoyancy engines and two thrusters. This innovative configuration allows the vehicle to move with exceptional versatility, maneuvering effectively in both vertical and horizontal directions. As such, the TPAUV is particularly suited for low-speed seabed survey missions, which require stability, precision, and efficient energy use in challenging underwater environments. To evaluate the TPAUV’s performance, the study employed advanced three-dimensional Computational Fluid Dynamics (CFD) simulations to perform a detailed analysis of its hydrodynamic properties. The analysis focused particularly on the turbulent flow generated by the propellers, which significantly influences vehicle behavior and energy efficiency. By assessing how fluid flow interacts with the vehicle’s structural components, the study aimed to optimize the TPAUV’s hydrodynamic performance while minimizing potential drag and turbulence-related inefficiencies. A standout feature of the TPAUV design is its ability to achieve a substantial separation between the center of gravity (CG) and the center of buoyancy (CB), ensuring exceptional stability during submerged operations. This feature is crucial for maintaining precise control and orientation, especially during complex seabed exploration tasks. Additionally, the study examined the hydrodynamic interactions between the two hulls, identifying both beneficial and adverse effects on the vehicle’s overall performance. Variables such as hull dimensions, shape effects, and the vehicle’s operating depth were investigated to better understand their influence on hydrodynamic interactions. Additionally, the relationship between drag force, lift force, and velocity, as well as the variation of hydrodynamic drag force over time, is also discussed in the study. The study highlighted specific areas where these interactions had the greatest and least impact, offering valuable insights into improving the TPAUV’s design. These findings not only validate the feasibility of the TPAUV’s unique configuration but also provide practical recommendations for enhancing the stability, efficiency, and reliability of underwater survey vehicles. This research serves as a foundational step toward advancing the design and control strategies of next-generation autonomous underwater vehicles.
TỔNG QUAN
Tàu tự hành dưới nước (AUV) đang thu hút sự chú ý toàn cầu bởi tiềm năng to lớn trong lĩnh vực khai thác và nghiên cứu. Mặc dù tại Việt Nam, AUV vẫn đang trong giai đoạn phát triển ban đầu, nhưng đây là bước đệm quan trọng cho tương lai. Với khả năng hoạt động độc lập, hiệu quả và an toàn, AUV hứa hẹn mang đến nhiều lợi ích cho các hoạt động dưới nước, mở rộng phạm vi nghiên cứu và thúc đẩy sự phát triển của ngành khai thác và nghiên cứu biển tại Việt Nam. Phương tiện tự hành dưới nước (AUV) là nền tảng robot không người lái có thể được điều khiển để thực hiện nhiều nhiệm vụ khác nhau dưới đáy biển. AUV có nhiều ứng dụng trong nhiều ngành công nghiệp, bao gồm dầu khí, ngoài khơi và vận chuyển, khoa học và nghiên cứu, kỹ thuật dưới nước, kiểm tra cơ sở hạ tầng, cứu hộ hàng hải, giám sát môi trường và quân sự 1 , 2
Tàu lượn dưới nước (UG) thường có thân hình trụ, cánh dạng lưỡi, mũi và đuôi tàu hình elip. Những thiết kế này đã được nghiên cứu rộng rãi về mặt tối ưu hóa biên dạng và thiết kế bộ điều khiển PID, như đã được chứng minh trong nghiên cứu về các mô hình như tàu lượn dưới nước Sea-Wing, Petrel-L và tàu lượn dưới nước lai 3 . Cấu hình Thân cánh hỗn hợp (BWB) của UG 4 , mang lại những lợi thế khác biệt, đặc biệt trong bối cảnh phục vụ như các phương tiện tự động dưới nước (AUV) được hỗ trợ bởi sức nổi và hoạt động ở tốc độ thấp. Sử dụng mô hình động học bắt nguồn từ phương trình Newton-Euler để cải thiện độ chính xác của việc điều hướng, giới thiệu một mô hình động mô tả chuyển động quay của AUV ở định dạng 3DOF 5 .
Động lực học chất lỏng tính toán (CFD) đóng vai trò then chốt trong việc khám phá các đặc tính thủy động lực học vốn có trong chuyển động của chất lỏng. Bằng cách sử dụng các phương pháp và thuật toán số, CFD cho phép phân tích dòng chất lỏng trong nhiều ứng dụng khác nhau, từ vi kênh đến buồng khử trùng và tàu lượn dưới nước hình ngư lôi đến máy thổi ly tâm. Tính linh hoạt của CFD thể hiện rõ ở phạm vi tiện ích rộng rãi của nó trong các ngành kỹ thuật cơ khí và khoa học ứng dụng 6 , 7
Nghiên cứu này nhằm mục đích xây dựng một mô hình tham số của Phương tiện tự hành dưới nước hai khoang để nâng cao hiệu suất thủy động lực của nó thông qua một phương pháp khả thi. Bài báo tiến hành xây dựng một mô hình đơn giản của TPAUV, kết hợp với các đặc tính của môi trường đáy biển, sau đó được tối ưu hóa để đánh giá hiệu suất thủy động lực học của tàu. Hiệu suất của biên dạng tại các điểm cụ thể trong không gian thiết kế được đánh giá thông qua phân tích CFD.
MÔ HÌNH TOÁN VÀ PHƯƠNG PHÁP SỐ
Mô hình tính toán
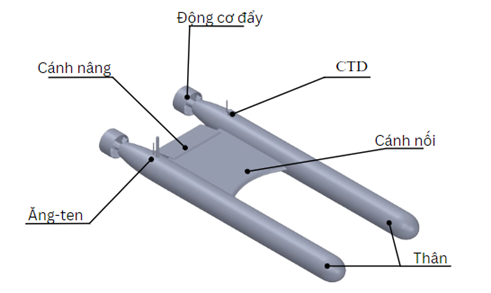
Một tấm nhôm, cũng có chức năng như cánh cố định của TPAUV, nối hai thân nổi. Thân chính của TPAUV là thân xoay hình ngư lôi, giúp giảm lực cản chuyển động dưới nước. Thân quay được mô hình hóa bằng các phương trình biên dạng thân tàu Myring và Figure 1 cho thấy cấu trúc tổng thể của TPAUV. Các thông số về kích thước được miêu tả trong Table 1 .
Các phương trình ba chiều (3-D) chi phối sự bảo toàn khối lượng, phương trình Navier-Stokes, động năng hỗn loạn và tốc độ tiêu tán của dòng chảy được sử dụng để nghiên cứu dòng nước biển một pha xung quanh TPAUV được thể hiện như sau 8 :
Trong đó, ρ là mật độ của nước biển, U là vector vận tốc, p là áp suất, g là gia tốc trọng trường, ϵ là sự tiêu hao của năng lượng động lực học hỗn loạn, μ là độ nhớt động lực học của chất lỏng, k là năng lượng động lực học hỗn loạn, μ t là độ nhớt hỗn loạn, P k là sự sản xuất hỗn loạn, P b là ảnh hưởng của nổi lực nổi, và γ M là sự đóng góp của sự mở rộng nhịp điệu không nén. Các giá trị của các hằng số tương quan là C 1ϵ = 1.44, C 2ϵ = 1.92, C 3ϵ = 0.09, σ k = 1, σ ϵ = 1.3.
Người ta quan sát thấy rằng không có sự khác biệt đáng kể giữa các mô hình nhiễu loạn khác nhau trong việc dự đoán sự khởi đầu của xâm thực để mô phỏng số lượng các dòng chảy rối, và mô hình nhiễu loạn k-omega (k-⍵) được cho là phù hợp cho cả mô hình giới hạn tường và mô hình nhiễu loạn dòng chảy cắt tự do. Do đó, mô hình nhiễu loạn k-⍵ được sử dụng trong nghiên cứu này. Mô hình k - ω là một trong những mô hình nhiễu loạn được sử dụng rộng rãi nhất cho khí động học và thủy động lực học bên ngoài và đã cho thấy tiềm năng tốt hơn để dự đoán các đặc điểm chính của dòng chảy thẳng đứng/tách biệt so với các mô hình khác. Các tác giả sử dụng mô hình ứng suất cắt (SST) k - ω thường được sử dụng vì nó hoạt động tốt trong các gradient áp suất bất lợi và dòng chảy tách biệt. Mô hình SST k - ω tạo ra mức nhiễu loạn hơi lớn ở những vùng có biến dạng chuẩn lớn, như vùng trì trệ và vùng có gia tốc mạnh.
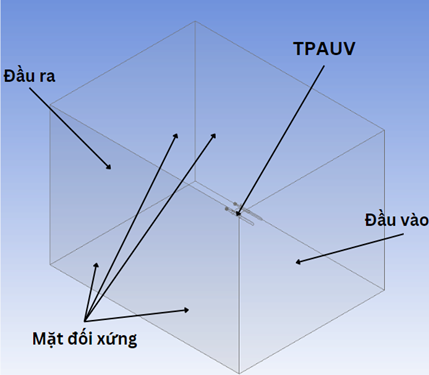
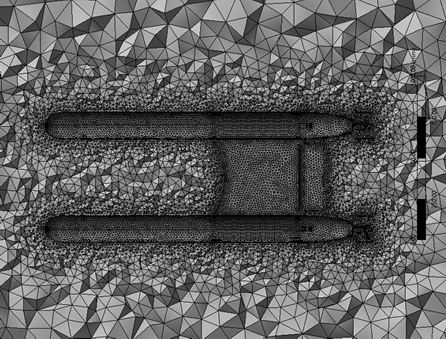
Kích thước của miền chất lỏng được mô tả trong Figure 2 và các điều kiện biên được minh họa trong Table 2 . Miền chất lỏng được tạo với ranh giới phía trên phải bằng 1-2 lần chiều dài của tàu lượn, L vehicle và ranh giới phía dưới phải gấp 3-5 lần L vehicle , để tránh bất kỳ sự tắc nghẽn nào bởi các bức tường. Bên cạnh đó, vị trí đầu vào phải cách vật thể 1.5 lần L vehicle và vị trí đầu ra phải cách vật thể 3.5 lần L vehicle . Thành trên, thành dưới và các thành bên phải được giữ bằng 9 lần đường kính của tàu lượn, D vehicle để tránh làm gián đoạn dòng chất lỏng. Ngoài ra, các thông số đầu vào của môi trường cũng được thể hiện ở Table 3 . Số lượng lưới được thiết lập ở mức khoảng 4x10 6 phần tử ( Figure 3 ) để đảm bảo độ chính xác của mô phỏng, cho phép nắm bắt các chi tiết phức tạp của dòng chảy; với số lượng phần tử lưới cao hơn, phân bố này được mô phỏng chính xác hơn mà vẫn tối ưu được thời gian mô phỏng.
Phương pháp số
Chiến lược chia lưới bao gồm một lưới gồm các phần tử dạng tứ diện với chi tiết nâng cao gần bề mặt của tàu để nắm bắt các mô hình dòng nước xung quanh nó một cách hiệu quả. Vùng xung quanh TPAUV được thiết lập bằng lưới tứ diện, với kích thước phần tử từ 1.5 mm đến 4 mm. Hàm lạm phát được sử dụng để nắm bắt các đặc tính dòng chảy trong các lớp ranh giới xung quanh mô hình phương tiện dưới nước. Về vấn đề này, các mắt lưới lớp lăng kính được tạo ra trên bề mặt của mô hình phương tiện dưới nước bằng cách sử dụng hàm lạm phát, như minh họa trong Figure 3 , đảm bảo rằng khoảng cách tường không thứ nguyên y + được duy trì dưới 1.
KẾT QUẢ VÀ THẢO LUẬN
Figure 4 minh họa các biến đổi trong phân bố áp suất và mô tả trực quan trường áp suất xung quanh thân thân tàu và cánh cố định. Các kết quả nêu bật tác động đáng kể của dòng chất lỏng lên các bộ phận chính như đầu mũi, cảm biến Độ dẫn điện, Nhiệt độ và Độ sâu (CTD) cũng như ăng-ten. Cụ thể, hình vẽ mô tả những dao động đáng chú ý về giá trị áp suất ở mũi tàu lượn, nơi áp suất dao động quanh mức 100.498x10 3 Pa. Sự dao động này được cho là do vai trò của mũi tàu là điểm tiếp xúc chính với dòng nước, dẫn đến lực cản tăng lên. Những hiện tượng như vậy bị chi phối bởi các nguyên lý cơ bản của động lực học chất lỏng, trong đó sự tương tác giữa các bề mặt rắn (chẳng hạn như cánh cung) và chất lỏng tạo ra lực cản đối với chuyển động. Hiểu được những động lực học này là rất quan trọng đối với việc thiết kế và vận hành tàu, đặc biệt là để tối ưu hóa hiệu suất và tiết kiệm nhiên liệu. Hơn nữa, các khu vực có áp suất tối thiểu (99.276x10 3 Pa) trên thân tàu được quan sát giữa mũi và thân, cũng như phía sau CTD và ăng-ten. Những vùng này có hình dạng mượt mà hơn, cho thấy ít cản trở dòng chất lỏng hơn. Quan sát này nhấn mạnh tầm quan trọng của việc lựa chọn vật liệu và thiết kế trong tương lai.
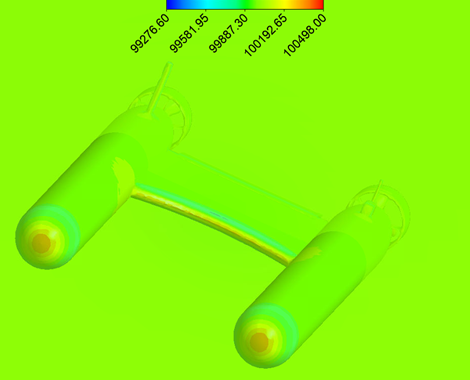
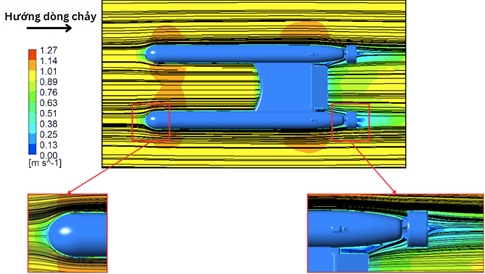
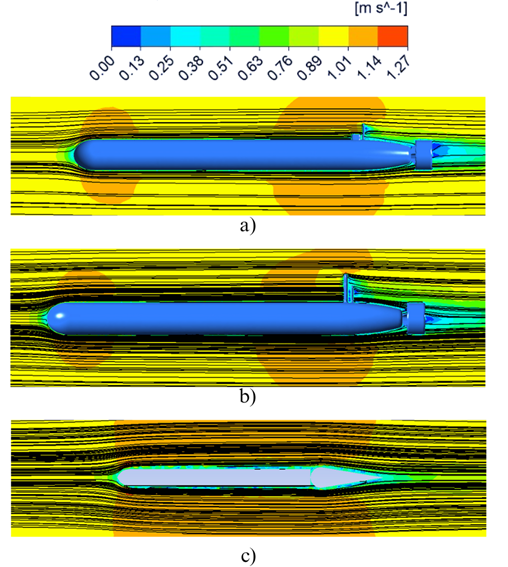
Figure 5 hiển thị sự phân bố vận tốc của dòng chảy xung quanh xe. Nó làm nổi bật các khu vực dòng chảy riêng biệt, bao gồm vùng vận tốc cao nhất tại điểm nối giữa mũi và thân, và trường vận tốc thấp nhất được quan sát phía sau thân và ở đầu thân thân tàu. Phân bố này thể hiện độ lớn và hướng của vận tốc dòng tự do tương ứng với tốc độ chuyển động của TPAUV. Figure 6 minh họa thêm sự phân bố vận tốc chất lỏng và sự sắp xếp hợp lý xung quanh TPAUV. Đáng chú ý, sự giảm vận tốc chất lỏng được quan sát thấy ở gần mũi, phía sau bộ đẩy và tại các cảm biến CTD và vị trí ăng-ten. Ngược lại, vận tốc chất lỏng cao nhất ở điểm nối giữa mũi và cơ thể, cũng như ở mép trước của cánh nơi nó nối với cơ thể. Vận tốc chất lỏng tối đa ghi được là 1.27 m/s khi tốc độ của tàu lượn là 0.5 m/s và vận tốc chất lỏng là 1.0 m/s. Ngoài ra, một vùng có tốc độ giảm, được gọi là luồng sóng, hình thành phía sau vật thể, trong khi dòng chảy ở phần trung tâm của cánh bám chặt vào bề mặt. Phân tích này cho thấy vận tốc thấp ở vùng đuôi sóng và vận tốc không tại các điểm đình trệ.
Các kết quả bằng số về mối quan hệ giữa lực kéo, lực cản và vận tốc dòng tự do được thể hiện trong Figure 7 . Về mặt lý thuyết, xu hướng phải là tuyến tính, sự chênh lệch phát sinh do các phép tính số sử dụng mô hình lý tưởng hóa không tính đến các yếu tố như bề mặt, độ nhám, biến dạng cánh, phần nhô ra nhỏ và các khía cạnh tương tự. Hơn nữa, những thay đổi về tốc độ bay hoặc dòng xoáy trong quá trình thử nghiệm cũng có thể góp phần tạo ra sự khác biệt. Ngoài ra, việc tăng vận tốc dòng chảy tự do còn dẫn đến lực cản và lực nâng tăng lên. Có thể nhận biết rõ ràng rằng sự thay đổi vận tốc dẫn đến việc thân tàu phải chịu lực cản rất lớn trong khi lực nâng lại được kiểm soát tốt. Điều này chứng tỏ việc điều khiển TPAUV nổi lên sẽ dễ dàng khi gặp dòng chảy có vận tốc lớn tuy nhiên, việc di chuyển sẽ gặp nhiều khó khăn. Kết quả nghiên cứu cho thấy sự phù hợp với số liệu thực nghiệm của He và cộng sự 9 về sự thay đổi của vận tốc dòng chảy đối với ảnh hưởng của thân tàu.
Figure 7 . Mốiliên hệ giữa vận tốc dòng chảy và lực cản, lực nâng tác dụng lên thân tàu
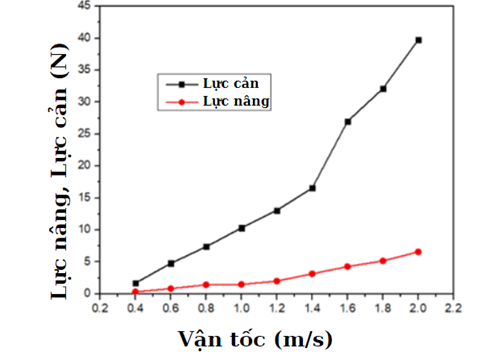
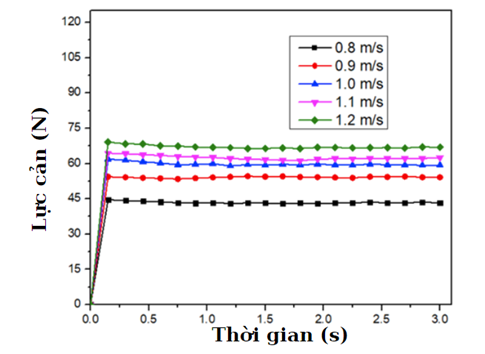
Figure 8 minh họa sự biến đổi theo thời gian của lực cản ở các vận tốc khác nhau. Ban đầu, lực cản tăng lên đáng kể, sau đó là sự ổn định dần dần theo thời gian. Mối quan hệ giữa lực cản và vận tốc là hiển nhiên, khi lực kéo tăng dần khi vận tốc tăng dần và ngược lại. Sự mất ổn định quan sát được ở các giá trị điện trở vượt quá giây đầu tiên có thể là do một số yếu tố. Mô phỏng nhất thời, không giống như mô phỏng trạng thái ổn định, có khả năng nắm bắt các chi tiết và tương tác dòng bổ sung do biến dạng lưới và biến đổi độ phân giải. Chúng cũng bao gồm các trạng thái dòng chảy động như sự tách dòng xoáy và sự phân tách dòng chảy, có tác động đáng kể đến lực cản. Những hiệu ứng động này gây ra sự phức tạp mà các giả định ở trạng thái ổn định có thể bỏ qua, nhấn mạnh tầm quan trọng của mô phỏng nhất thời trong mô hình động lực học dòng chảy một cách chính xác.
Kết luận
Các đặc tính thủy động lực của Phương tiện tự hành dưới nước hai khoang (TPAUV) đã được nghiên cứu bằng phương pháp số và mô hình hóa trong nghiên cứu này. Thiết kế của hai thân nổi dựa trên phương trình Myring để giảm lực cản dưới nước tác động lên con tàu. Kết quả tính toán cho thấy mũi của vật nổi chịu áp lực rất lớn khi nước chảy qua tàu. Ngoài những phát hiện nêu trên, việc thực hiện mô phỏng lưới động chất lượng cao đã mang lại kết quả khả quan. Những mô phỏng này đã được chứng minh là công cụ giúp hiểu được đặc tính thủy động lực học của TPAUV. Những hiểu biết sâu sắc thu được từ những mô phỏng này có thể được tận dụng để phát triển các cơ chế vận động thay thế cho phương tiện trong các nỗ lực nghiên cứu trong tương lai.
DANH MỤC TỪ VIẾT TẮT
TPAUV Twin-Pod Autonomous Underwater Vehicle
CFD Computational Fluid Dynamics
AUV Autonomous Underwater Vehicle
UG Underwater Glider
BWB Blened-Wing-Body
PID Proportional – Integral – Derivative
DOF Degree of Freedom
SST Shear Stress Transport
CTD Conductivity Temperature Depth sensor
LỜI CẢM ƠN
Nghiên cứu được tài trợ bởi Đại học Quốc gia Thành phố Hồ Chí Minh (ĐHQG-HCM) trong khuôn khổ Đề tài mã số B2024-20-06. Chúng tôi xin cảm ơn Phòng thí nghiệm Trọng điểm Điều khiển số và Kỹ thuật Hệ thống, Trường Đại học Bách khoa, ĐHQG-HCM đã hỗ trợ thời gian, phương tiện và cơ sở vật chất cho nghiên cứu này.
Xung đột lợi ích
Nhóm tác giả xác nhận không có xung đột lợi ích liên quan đến công trình nghiên cứu.
Đóng góp của tác giả
Nhóm tác giả mô phỏng bằng phần mềm ANSYS Fluent để thực hiện mô phỏng số và sử dụng phần mềm SolidWorks để thực hiện thiết kế. Các thành viên đều có đóng góp như nhau trong nghiên cứu này.
References
- Sun K., Cui W., Chen C.. Review of underwater sensing Technologies and applications. Sensors. 2021;21(23):7849. Google Scholar
- Paull L., Saeedi S., Seto M., Li H.. AUV Navigation and Localization: A Review. IEEE Journal of Oceanic Engineering. 2014;39(1):131-149. Google Scholar
- Yu J., Jin W., Tan Z., Huang Y., Luo Y., Wang X.. Development and experiments of the Sea-Wing underwater glider. China Ocean Engineering. 2011;25(4):721-736. Google Scholar
- Du X., Ali N., Zhang L.. Numerical simulations for predicting wave force effects on dynamic and motion characteristics of blended winged-body underwater glider. Ocean Engineering. 2021;235:109312. Google Scholar
- Karmozdi M.Hashemi, Salarieh H., Alasty A.. INS-DVL navigation improvement using rotational motion dynamic model of AUV. IEEE Sensors Journal. 2020;20(23):14329-14336. Google Scholar
- Le T.L., Chen J.C., Shen B.C., Hwu F.S., Nguyen H.B.. Numerical investigation of the thermocapillary actuation behavior of a droplet in a microchannel. Int. J. Heat Mass Transfer. 2015;83:721-730. Google Scholar
- Le T.L., Chen J.C., Hwu F.S., Nguyen H.B.. Numerical study of the migration of a silicone plug inside a capillary tube subjected to an unsteady wall temperature gradient. Int. J. Heat Mass Transfer. 2016;97:439-449. Google Scholar
- Le T.L., Hong T.D.. Computational Fluid Dynamics Study of the Hydrodynamic Characteristics of a Torpedo-Shaped Underwater Glider. Fluids. 2021;6:252. Google Scholar
- He M., Williams C., Crocker P.R.E., Shea D., Riggs N., Bachmayer R.. A simulator developed for a twin-pod AUV, the Marport SQX-500. Journal of Hydrodynamics/Journal of Hydrodynamics. Ser. B. 2010;22:184-189. Google Scholar





