

 Open Access
Open Access Abstract
An autonomous underwater helicopter (AUH) is an autonomous underwater vehicle that is highly useful for performing subsea missions. It was proposed at the Ocean College of Zhejiang University. An appropriate hull structure for an AUH needs to be adjusted to perform multidirectional movement, rotation, and precise hovering in the marine environment. The viable geometric form of the AUH also needs to be simple for easy manufacturing, such as spherical, ellipsoidal, or disk shapes, which could be considered feasible designs for the AUH. The disk-shaped AUH has lower drag in the horizontal plane than other shapes but higher drag in the vertical plane compared to other profiles. However, the disk shape allows the AUH to maintain good position holding and stability in vertical plane movements. The physical model and boundary conditions are built according to the experimental model of the previous research. The continuity, Navier-Stokes, and energy equations are solved by the finite volume method. In this study, the hydrodynamic characteristics of an AUH are analyzed and simulated by ANSYS Fluent software. The numerical results clearly show the velocity field and pressure distribution around the AUH when it moves through the water. The larger the velocity and angle of attack, the larger the drag force. The numerical results of the hydrodynamic characteristics of the AUH contribute to increasing the efficiency, maneuverability, and energy savings when an AUH moves through the ocean. This is the basis for achieving the optimal design of disk-shaped autonomous underwater vehicles in the future.
Giới thiệu
Trong những năm gần đây việc nghiên cứu tính ổn định cho phương tiện tự hành dưới nước (AUV) đang ngày càng nhiều. AUV là một thiết bị được ứng dụng để thực hiện các nhiệm vụ dưới nước như khám phá sinh vật biển, quan sát đáy đại dương, kết nối thông tin liên lạc dưới nước, 1 , 2 , 3 …. Gần đây các nhà khoa học trên thế giới đã đưa ra nhiều hình dạng cho các tàu tự hành, nổi bật trong với tên gọi là tàu tự hành dưới nước dạng đĩa (AUH).
AUH thường được sử dụng cho các nhiệm vụ dưới nước vì vậy chúng thường được phóng từ tàu mẹ, việc nghiên cứu xem sự ảnh hưởng của góc phóng tác dụng với biên dạng tàu giúp tránh được những ảnh hưởng không mong muốn đối với tàu 4 . Đối với AUH thì việc giữ cân bằng trong quá trình di chuyển, sự đóng góp của hệ thống đẩy có vai trò rất quan trọng. Trong quá trình vận hành việc kéo dài được thời gian hoạt động rất có ý nghĩa, chính vì vậy việc thay thế dùng ba bộ đẩy thay vì bốn bộ đẩy mà không làm ảnh hưởng đến sự linh hoạt của AUH đã được thực hiện 5 . Hiện nay, mặc dù AUH có tiềm năng cơ động cao nhưng chỉ mới có những thử nghiệm đường di chuyển đơn giản, bởi vì thiếu độ chính xác cao của hệ thống thăm dò. Tiếp đến chúng ta cần thực hiện những đường đi phức tạp hơn để AUH thể hiện rõ khả nảng cơ động tuyệt vời của nó. Bên cạnh đó với sự chính xác cao của hệ thống định vị chúng ta có thể tiến hành được những hoạt động phức tạp hơn trong lĩnh vực quân sự.
Tính toán động lực học chất lưu (CFD) đóng vai trò then chốt trong việc tìm hiểu các đặc tính thủy động lực học vốn có trong chuyển động của chất lỏng. Bằng cách sử dụng phương trình Navier-Stokes và các phương trình phần tử hữu hạn, CFD cho phép phân tích sự tương tác giữa lưu chất với tàu tự hành dưới nước, ngư lôi,.... Từ đó có thể đề xuất cải thiện thiết kế cho chúng. Pan và các cộng sự 6 đã phân tích đặc tính thủy động học của thiết bị dưới nước (UUVs) và đưa ra kết quả biên dạng thuận tốt đối với biên dạng mới. CFD cũng được ứng dụng trong việc nghiên cứu đặc tính khí động học của bơm ly tâm. Bài nghiên cho thấy áp suất và số vòng quay của bơm ly tâm có mối liên hệ chặt chẽ với nhau 7 . Tính linh hoạt của CFD thể hiện rõ ở phạm vi tiện ích rộng rãi của nó trong nhiều ngành khác nhau giúp tiết kiệm được chi phí phát triển sản phẩm 8 .
Nghiên cứu này nhằm mục đích khảo sát thủy động lực của AUH thông qua một phương pháp số. Bài báo tiến hành xây dựng một mô hình đơn giản của AUH, kết hợp với các đặc tính của môi trường đáy biển, sau đó được tối ưu hóa để đánh giá hiệu suất thủy động lực học của tàu. Hiệu suất của biên dạng tại các điểm cụ thể trong không gian thiết kế được đánh giá thông qua phân tích CFD.
MÔ HÌNH TÍNH TOÁN VÀ PHƯƠNG PHÁP SỐ
Mô hình tính toán
Vì phần mềm mô phỏng CFD có tính chất mô-đun nên cần phải chọn đúng mô-đun trước khi mô phỏng:
- Bài toán xét sự tương tác giữa tàu lượn và môi trường nước: đây là sự tương tác giữa một vật rắn với cấu trúc và chất lỏng.
- Ngoài chuyển động của nước, tàu lượn còn có chuyển động riêng.
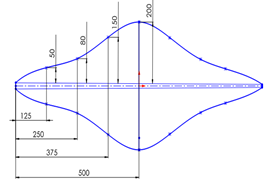
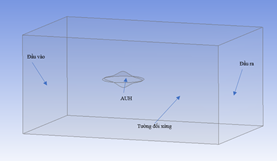
AUH được đặt trong môi trường nước có diện tích H x W x L trong đó H là chiều cao, W là chiều dài và L là chiều rộng của môi trường nước. Thân tàu hình đĩa ban đầu được cho là có hình dạng đĩa với các kích thước sau: Thân tàu hình đĩa là một trong những thiết kế chủ chốt của Máy bay trực thăng tự hành cỡ nhỏ dưới nước (S-AUH). Để đạt được mục tiêu về khả năng cơ động cao trong mặt phẳng nằm ngang và độ ổn định tốt theo phương thẳng đứng, thân tàu dạng đĩa phải được thiết kế như một thân quay, đó là lý do thân tàu được xác định bằng một đường cong. Sau khi xem xét các đường cong khác nhau, các đường cong B-Splines hợp lý không đồng nhất (NURBS) đã được chọn vì tính liên tục của độ cong và định nghĩa đơn giản của chúng, giúp cho việc thiết kế và điều chỉnh trở nên dễ dàng hơn. Figure 1 trình bày các thông số trong việc xây dựng mô hình của AUH.
Để mô tả sự ảnh hưởng của dòng lưu chất đối với chuyển động của AUH trong quá trình chuyển động, phương trình Navier-Stokes và các phương trình liên quan khác được sử dụng. Điều này đã được ứng dụng rộng rãi và được áp dụng thành công trong phân tích thủy động học của UUVs 9 , chuyển động sóng. Phương trình Navier-Stokes cho phương trình mô tả bảo toàn moment và bảo toàn khối lượng của chất lỏng Newton, ở dạng không ổn định. Theo nghiên cứu của Masterov 10 , việc ứng dụng mô hình k- là phù hợp cho nghiên cứu này.
Với V là vận tốc của tàu, ρ là khối lượng riêng của nước, g là gia tốc trọng trường; p là áp suất, μ là hệ số động lực học của lưu chất, ε là hệ số sự phân tán động năng hỗn loạn, k là động năng hỗn loạn, µ t là độ nhớt hỗn loạn, G k là sự nhiễm loạn động năng do gradient vận tốc trung bình, G b là là sự nhiễm loạn động năng do độ nổi và Y M là sự giãn nở dao động trong nhiễu loạn nén vào tốc độ tiêu tán của lưu chất ; C 1ε = 1,42; C 2ε = 1,68; C 3ε = 0,09. Công thức các đại lượng còn lại µ t , G k và G b :
(5)
(6)
(7)
Trong đó C μ là hằng số, S là tốc độ biến dạng.
Phương pháp số
Để tìm hiểu về thủy động lực học của AUH thì phương pháp thể tích hữu hạn được áp dụng. Figure 2 thể hiện khu vực sát biên dạng tàu chúng ta tạo lưới chữ nhật và ở xa hơn là lưới tứ diện. Theo những giá trị thích hợp cho việc chia lưới trong mô phỏng này là , độ dày của lớp biên AUH 20 ≤ y + ≤ 200 và Δy = 8 mm. Trong mô phỏng này tổng số phần tử lưới là 537965, số lượng phần tử này cũng được so sánh với số lượng phân tử trong tài liệu của nhóm tác giả An. et al 11 đây là số lượng phần tử phù hợp.
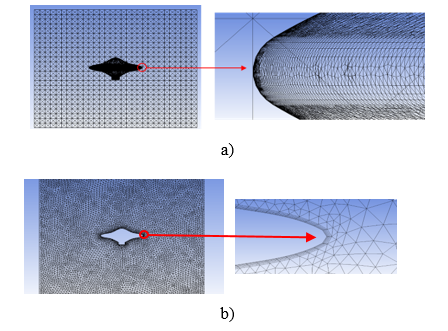
Figure 3 và Table 1 đưa ra các điều kiện đầu vào của mô phỏng và các thông số cần thiết.
Đầu vào: Vận tốc lưu chất = u
Đầu ra: Áp suất đầu ra P = 0 pa
Tường không trượt: v fluid = v wall = 0
Tường trượt:
KẾT QUẢ VÀ THẢO LUẬN
Figure 4 mô tả dòng chảy của lưu chất qua biên dạng AUH, ở vị trí đuôi tàu có xuất hiện khu vực tạo xoáy điều này làm cho con tàu mất ổn định trong quá trình di chuyển. Vận tốc con tàu 1 m/s, ở vị trí mũi tàu sẽ hình thành điểm dừng khi dòng lưu chất tới điểm này sẽ làm cho vận tốc của chúng đạt giá trị nhỏ nhất. Sau đó các đường dòng sẽ bám theo biên dạng của vật thể, khi ở vị trí đỉnh tàu và vị trí cuối của đầu do thám thì vận tốc của lưu chất ở đây đạt giá trị cao nhất. Chính vì hiện tượng này làm ảnh hưởng trực tiếp đến lực cản giữa bề mặt của vỏ tàu và lưu chất.
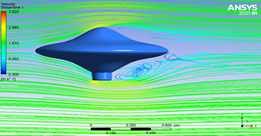
Figure 5 cho thấy sự thay đổi của giá trị vận tốc tại các thời điểm khác nhau trong quá trình AUH hoạt động. Tại thời điểm ban đầu, các đường dòng bao quanh AUH là các đường laminar bởi vì khi này vận tốc của tàu đang còn khá nhỏ chưa gây ra sự thay đổi nhiều đối với môi trường xung quanh. Sau một khoảng thời gian, tàu đạt được tốc độ cao hơn khi này cũng bắt đầu hình thành vùng tạo xoáy ở phía sau đuôi tàu. Tại thời điểm 8s, tàu đạt được vận tốc đầu ra mong muốn thì vùng tạo xoáy được hình thành một cách rõ ràng hơn.
Figure 5 . Trườngvận tốc của dòng chảy xung quanh AUH tại cácthời điểm khác nhau
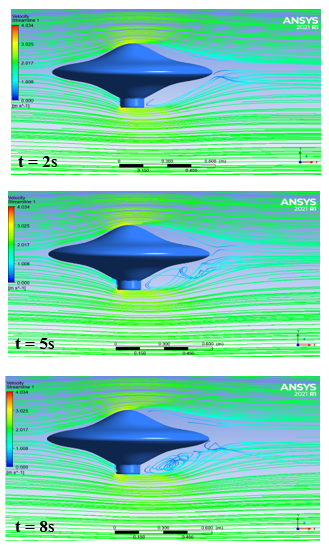
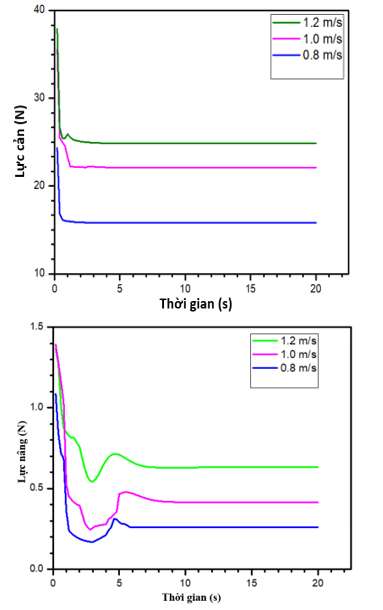
Figure 6 cho thấy mối quan hệ giữa vận tốc và lực cản với các vận tốc khác nhau. Khi vận tốc tăng thì lực cản tác động lên AUH cũng sẽ tăng theo. Điều này phù hợp với phương trình tính lực cản, trong đó lực cản có tỉ lệ thuận với tốc độ của vật thể. Đây là một ảnh hưởng quan trọng góp phần hiểu hơn về sự tương tác giữa AUH đối với lưu chất. Tại vận tốc thấp, lực cản nhỏ thì sẽ giúp cho AUH tiết kiệm được năng lượng. Khi lực cản lớn thì ngược lại sẽ gây ảnh hưởng đến quá trình giữ cân bằng của AUH trong quá trình di chuyển. Lực nâng cũng bị ảnh hưởng bởi vận tốc khi vận tốc tăng cao thì lực nâng tăng, mặc dù vậy nhưng do biên dạng tàu tạo hai xoáy đối xứng trên dưới nên tàu khi chuyển động ngang lực nâng có giá trị tương đối nhỏ so với lực cản.
Trong Figure 7 thể hiện đường dòng chảy qua hình dạng của AUH với các góc tấn (AOA) khác nhau. Góc tấn (AOA) là góc được hợp bởi phương di chuyển của AUH với phương tới của dòng chảy lưu chất trong mặt phẳng nằm ngang (Oxy). Với việc AOA tăng thì vùng tạo xoáy cũng lớn hơn. Tại AOA thấp (0 - 5 ), khu vực tạo xoáy khá nhỏ. Nhưng khi AOA = 10 thì vùng tạo xoáy lớn hơn.
Figure 7 . Trườngvận tốc xung quanh AUH khi tàu chuyển động với vận tốc 1 m/s trong các trườnghợp góc tấn khác nhau
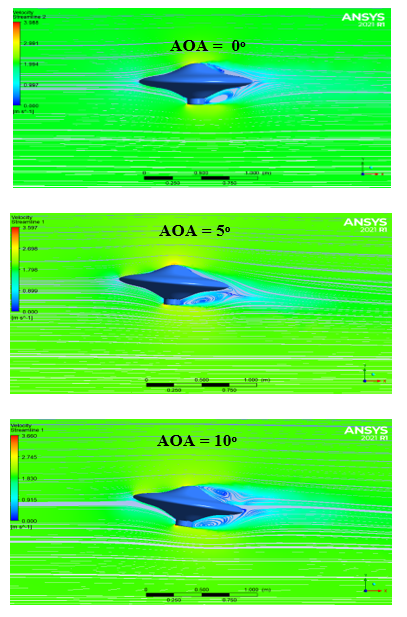
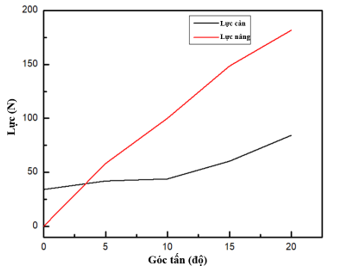
Figure 8 cho thấy xu hướng của lực cản theo các góc tấn khác nhau. Theo hình tại AOA = 0 , lực cản và lực nâng có giá trị nhỏ nhất. Lực cản sẽ tăng lên khi AOA tăng. Lực nâng khi AOA = bằng 0,115 (N) cho thấy sự ổn định của AOA khi di chuyển ngang, tuy nhiên khi AOA càng tăng thì sự dao động trong quá trình chuyển động của tàu sẽ càng nhiều do lực nâng lúc này tăng lên đáng kể. Điều này làm cho con tàu rất dễ mất cân bằng trong quá trình di chuyển vì vậy thuật toán điều khiển bộ nổi cho con tàu phải được tính toán kĩ lưỡng để giúp tàu ổn định tránh đi không đúng hành trình.
Figure 8 . Lựccản và lực nâng của tàu tại vận tốc 1 m/s với các góc tấn khác nhau
Kết luận
Các đặc tính thủy động lực của tàu tự hành dưới nước dạng đĩa (AUH) đã được nghiên cứu bằng phương pháp số và mô hình hóa trong nghiên cứu này. Kết quả mô phỏng cho thấy mũi chịu áp suất lớn trong quá trình tàu hoạt động. Các kết quả của lực cản và lực nâng theo thời gian khi AUH di chuyển với góc tấn là 0 cho thấy biên dạng hiện tại của tàu có độ ổn định cao. Khi ta tăng vận tốc của tàu sẽ làm cho cả lực cản và lực nâng tăng lên. Bên cạnh đó khi AUH di chuyển với các góc tấn khác nhau đã tạo ra các vùng xoáy rõ ràng hơn xung quanh thân AUH. Điều này có tác động lớn đến sự ổn định của AUH khi di chuyển với AOA = 5 thì lực cản khoảng 62 N nhưng khi AOA = 20 lực cản gần 200 N. Sự phân tích đặc tính thủy động học của AUH có thể cung cấp tham khảo ý nghĩa cho sự phát triển các mẫu AUH mới hơn trong tương lai. Dựa vào kết quả có được về sự ổn định của mẫu AUH hiện tại tiến hành thêm các nghiên cứu cho bộ đẩy và hệ thống nổi của AUH.
DANH MỤC TỪ VIẾT TẮT
CFD Computational Fluid Dynamíc
AUV Autonomous Underwater Vehicle
AUH Autonomous Underwater Helicopter
AOA Angle of Attack
Xung đột lợi ích
Nhóm tác giả xác nhận không có xung đột lợi ích liên quan đến công trình nghiên cứu.
Đóng góp của tác giả
Nhóm tác giả mô phỏng bằng phần mềm ANSYS Fluent, sử dụng INVENTOR để xây dựng mô hình 3D. Các thành viên đều có đóng góp như nhau trong nghiên cứu này.
References
- Zhang B., Ji D., Liu S., Zhu X., Xu W.. Autonomous Underwater Vehicle Navigation. A Review, Ocean Engineering. 2023;273:113861. Google Scholar
- J.Zhang M.Liu, Zhang S., Zheng R., Dong S.. Five-Tiered Route Planner for Multi-AUV Accessing Fixed Nodes in uncertain Ocean Environments. Ocean Engineering. 2024;292:116597. Google Scholar
- Wang Y., Hu R., Chen Y., Huang S.H.. Adaptive Noise Cancelling for an AUV-mounted Passive Inverted USBL Array. Ocean Engineering. 2023;288(1):115998. Google Scholar
- Chen C.-W., Wang T., Feng Z., Y.Lu H.Huang, Ji D., Chen Y.. Simulation Research on Water-Entry impact Force of an Autonomous Underwater Helicopter. Journal of Marine Science and Technology. 2020;25:1166-1181. Google Scholar
- Liu Z., Zhou J., Wang Z., H.Zhou JChen, X.Hu YChen. Research on an Autonomous Underwater Helicopter with Less Thrusters. Journal of Marine Science and Engineering. 2022;10:1444. Google Scholar
- Guang P., Hu B., Du X.X., Wang Y.Y.. Research on Hydrodynamic Characteristics of Underwater Gliding UUV Based on the CFD Technique, Adv. Mater. Res. 2012;479:729-732. Google Scholar
- Le T.-L., Tran T.N., Hong D.-T., Mai H.K.S.. Numerical Studyof Aerodynamic Performance and Flow Characteristics of a Centrifugal Blower. International Journal of Intelligent Unmanned Systems. 2022;11(3):396-406. Google Scholar
- Le T.-L., Hong D.-T.. Computational Fluid Dynamics Study of the Hydrodynamic Characteristic of a Torpedo Shaped Underwater Glider. . 2021;6:252. Google Scholar
- Liu X., Hu Y., Mao Z., Tian W.. Numerical Simulation of the Hydrodynamic Performance and Self-Propuksion of a UUV near the Seabed. Appiled Sciences. 2022;12:6975. Google Scholar
- Masterov M.V., Baltussen M.W., Kuipers J.A.M.. Numerical Simulation of a Square Bubble Column Using Detached Eddy Simulation and Euler-Lagrange Approach. International Journal of Multiphase Flow. 2018;107:275-288. Google Scholar
- An X., Chen Y., Huang H.. Parametric Design and Optimization of the Profile of Autonomous Underwater Helicopter Based on NURBS. Journal of Marine Science and Engineering. 2021;9:668. Google Scholar





